Herkese Merhaba,
Umarım aşağıdaki anlatım işinize yarar.
AMAÇ
Elektronik bilgisi olmaksızın, standart modelcilik becerileri ve aletleri ile evde yapılabilecek, 40cm eninde, 5-8cm yüksekliğinde hareket imkanı olan ve istenilen uzunlukta kanat kesebilecek, sökülüp dolaba atılabilecek ucuz bir CNC yapmak.
MALZEMELER
Malzemelerin çoğu Bauhouse’da mevcut, sadece paslanmaz civata ve rulmanları perşembe pazarından, motorları Karaköyden, CNC kontrol kartını www.denizelektronik.com adresinden sipariş etmeniz kafi.
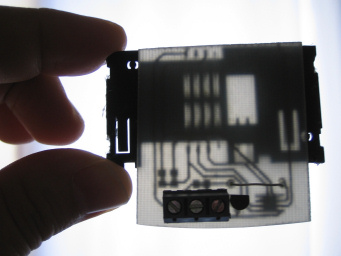
- Deniz Elektronik (DeLab) 4 Eksenli CNC Kontrol Kartı (150YTL)
- 12Volt Güç Kaynağı (Bilgisayar güç kaynağı 30YTL)
- 80mmX500mmX12mm ebadında 2 adet MDF (X eksenleri için – Tüm MDF aksam Bauhouse da 2.5 YTL ye kestirildi)
- 80mmX80mmX8mm Ebadında 2 adet MDF levha (Support-Y Ekseni taşıyıcıları için)
- 80mmX100mmX8mm Ebadında 2 adet MDF levha (Y Ekseni için) 100mm değil 150mm de yapılabilir.
- M6 1000mm boyunda paslanmaz civata (vidalı mil için – tanesi 4 ytl)
- M6 pazlanmaz somunlar (Yatak hareketleri için 1-2 YTL)
- 5mm iç çapı olan 4 adet rulman (yataklama için – 4 ytl)
- 1000mmX10mmX10mm ebadında aluminyum U profil (yatak için 3.5 YTL)
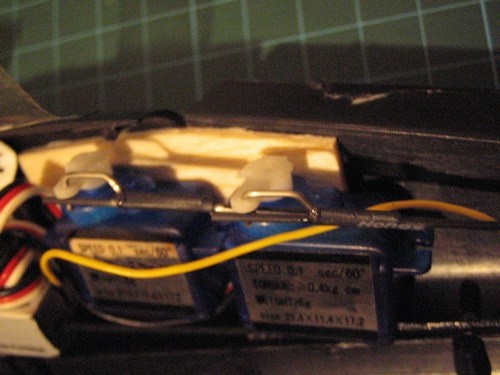
- Uygun Step Motor (10 YTL tanesi)
- 2 takım 300mm lik çekmece kızağı (4 YTL)
X EKSENİ YAPIMI
U Profili ve vidalı mili tam ortadan bölerek 50 cm lik 2 parça elde ediyoruz.
Öncelikle malzemelerimizi bir arada görelim

M6 somunların çok güzel bir özelliği var, 10mm lik U profilin içindeki boşluğa çok güzel biçimde oturuyorlar.
Yatağı hazırlamak için MDF Levhamızın üzerine boydan boya çiftaraflı bant çekiyor ve U Profili bu bant ile mdf ye yapıştırıyoruz. Ben kolay sökülebilmesi için çift taraflı bant kullandım, direk yapıştırmak da mümkün.

Motorumuz ile vidalı milimizi birbirine kaplin ile bağlamamız gerekiyor, amaç motor ekseni ile vidalı mil ekseni arasında oluşabilecek uyumsuzlukları göz ardı edebielcek şekilde kuvveti bir taraftan diğerine iletmek.
Aşağıda yaptığım, gelmiş geçmiş en dandik ancak işe yarar kaplinlerden biri görülüyor. Makaronu motorumuzun dişlisi üzerine geçirip, içeriye sıcak silikon doldurupvidalı mili bastırıyruz, sonra makaronu ısıtıp iyice dışına oturmasını sağlıyoruz, böylece silikon sayesinde bir miktar esnek ancak gücü iletebilecek sağlamlıkta bir bağlantı elde ediyoruz. Makine elemanları hocalarım beni affetsin ama buna "kaplin" deniyor
Buyrun kaplinimiz böyle.

Vidalı milimizi motora monte ettiğimize göre, U profili monte ettiğimiz zemine motoru da yerleştirip yatağımızı hazırlamaya başlıyoruz.

U Profilde vidalı milde 50cm boyunda, ancak vidalı mil motorun milinin önüne geldiği için diğer taraftan bir miktar taşıyor, milin uç kısmındaki dişleri taşlayarak bu taşan kısmın rulmanın içinden geçmesini sağlıyoruz.
Rulmanın altına bir parça destek yapıp yapıştırdığımızda, bu gördüğünüz durum ortaya çıkıyor.

Vidalı milimizin içine U yatağımızda yürümesi için 2 adet comun yerleştiriyoruz. Ve malzeme listesinde vermediğim bir parça teneke (ben aluminyum buldum) kullanarak aşağıdaki gibi bir U hazırlıyoruz, Bu U parça Y eksenini taşıyacak olan platformu X ekseni üzerinde hareket ettirecek olan parça. Ve iki somunun arasındaki boşluğa yerleşerek, vidalı mil döndükçe hareket eden somunlar ile bereber hareket edecek.

Yerine yerleşince böyle görünecek,

80x80mm lik MDF ürerine parçayı vidalıyoruz.

Taşıyıcı yerine yerleştiripip, çekmece raylarına vidalandığında böyle görünüyor.

İşte X Eksenlerince birincisi hazır

Evet X Eksenimiz başlandıktan 2 saat sonra tamamlandı.
Dikey eksen oldukça basit, çünkü tek yapması gereken telin bağlanacağı bir somunu hareket ettirmek.
Öncelikle 150mmX80mmx8mm lik MDF levhamızı taşıyıcımıza epoxy ile yapıştırıyoruz.

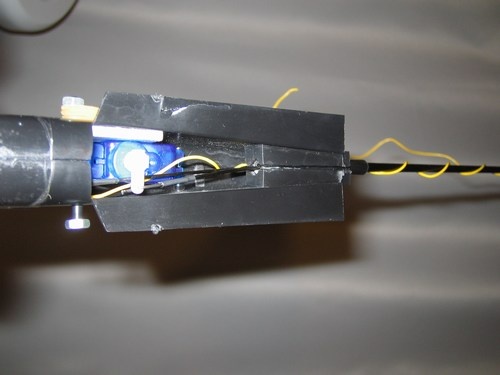
Daha sonra X ekseni ile aynı şekilde motorumuza bağladığımız 140mm boyundaki vidalı milimizin, yine aynı şekilde taşladığımız ucunu rulmana geçirip, fotoğraftaki gibi sabitliyoruz.

Böylece Y eksenimiz de hazır, Yapıştırdığımız kısımlara üçgen destekler koyup sağlamlık artırılabilir.
Rezistans telimiz ufak ufak bir yay aracılığı ile vidalı mil üstündeki somuna sabitlenecek, o kısmı yaratıcılığınıza kalmış.
Sistemin tek hatası, dikine duran MDF levhayı X eksenine dik yerleştirmem oldu, paralel yerleştirilmesi durumunda açılı kesimlerde telin mdf ye çarpması sorununun önüne geçilebilirdi. Ben bu sorunu ekseni kenara alarak çözeceğim.
Nihayet 4 Eksen de tamamlandı 🙂
İşte tezgahın çalışır vaziyetteki hali;

Oda birhayli dağıldı ama, sonuç oldukça tatmin edici.
Güç kaynağı olarak PC güç kaynağı kullandım, çünkü motorlarım 5V ile dirençsiz sürülünce en iyi performansı verdiyor, dirençsiz sürüş için CNC Kontrol Kartının altında bulunan dirençleri iptal ettim ve motor beslemesini PC güç kaynağının 5V ucundan bağladım.

Vidalı mili yukarıda anlattığım biçimde kullanınca, aluminyum kanaldaki sürtünme sebebi ile adım kaçırmalar oluyordu, U şeklindeki kanalı söküp, civatayı doğrudan MDF plakaya yapıştırarak eksen hareketini sağladım, bu sayede sürtünme birhayli azalıyor, tabi mdf ye yapıştırılmış civata biraz iptidai bir çözüm.

Kesme telini, M3 civarata pulu aracılığı ile paket lastiğine bağladım, tel gerginliğini paket lastiği koruyor, özellikle açılı kesimlerde lastik bol bol esneyerek eksenlerin aşırı yüke binmeden hareketine imkan sağlıyor.

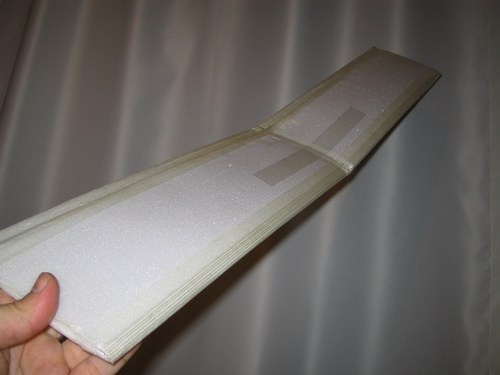
Ve sonuç

3 derece washout lu AG13 profili sol taraf kanat ucu 100mm boyunda, kanat başı ise 150mm yine AG13

Kanat ucunda profil kalınlığı sadece 4mm, kesim kusursuz.

Kesim programı olarak GMFC kullandım, bu program external timer (dış zamanlayıcı) ile kesme üretilerek çalıştırılıyor. Ancak kullandığım CNC kartında bu özellik yoktu, bu sebeple paralel portun 10 numaralı acağındna 2 kHz lik kesme sinyali gönderen bir zamanlayıcı yapıp eklemek zorunda kaldım.
Tabi JediCUT kullanırsanız bu zamanlayıcıya gerek yok, ancak ben laptop kullanıyorum ve dışarıdan taktığım paralel port kartını JediCUT malesef görmedi.
Tezgahım bittiğine göre, bundan sonra gelsin DLG kanatları…





















































































 ve içinden şöyle birşey çıkar
ve içinden şöyle birşey çıkar






















































































{kind=link}
{kind=link}